Two View Geometry
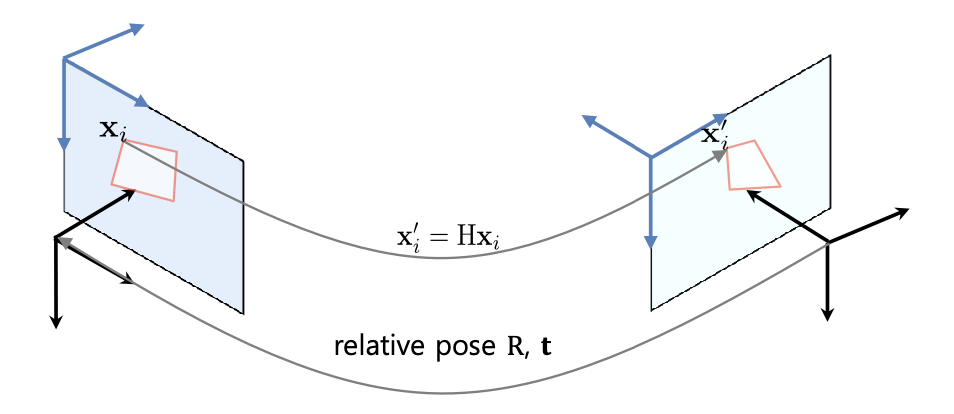
Planar 2D-2D Geometry (Projective Geometry)
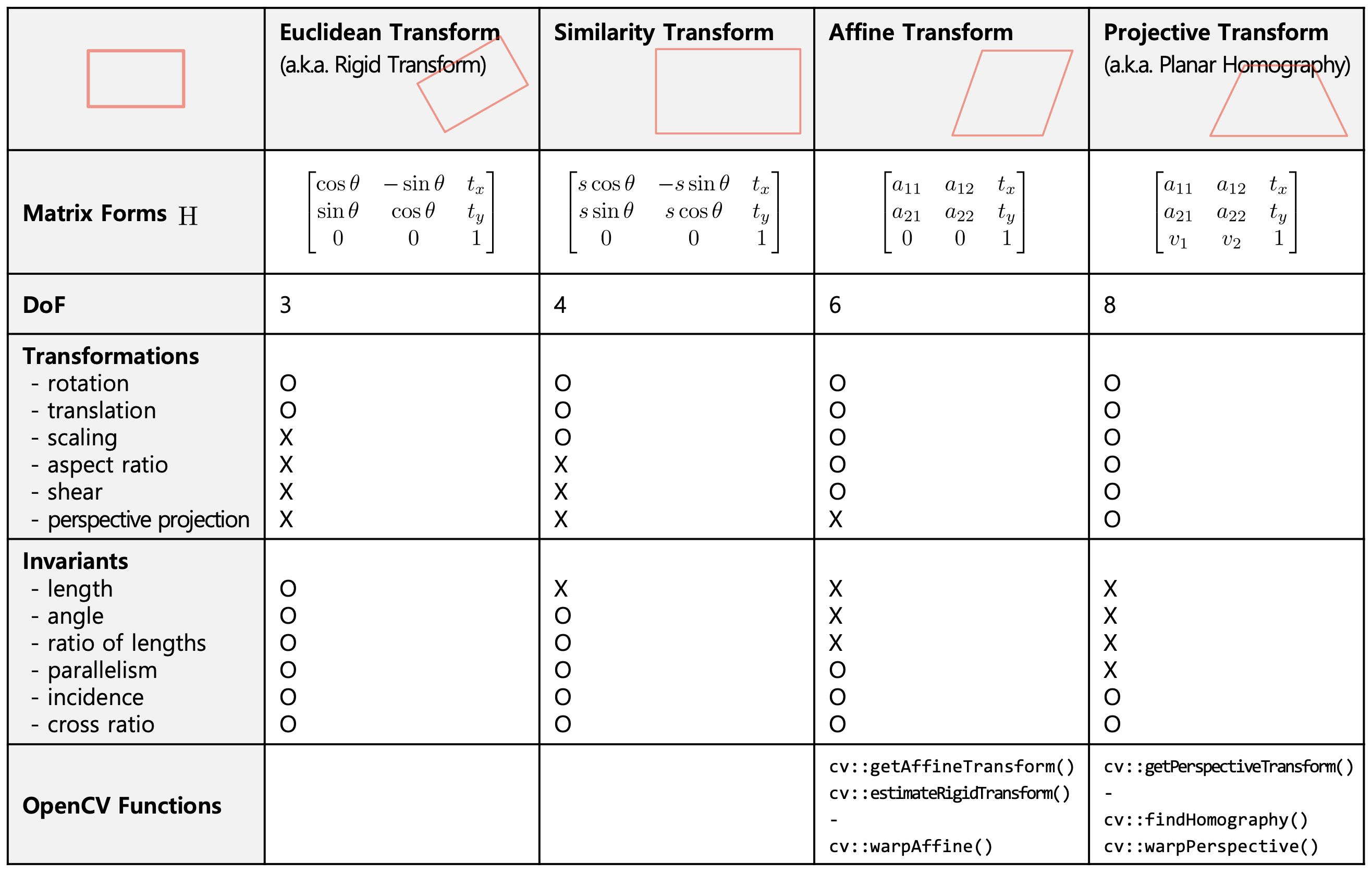
Overview of Perspective Geometry
-
Planar Homography Estimation
- Unknown
Planar homography (8 DoF)
- Given
- Point correspondence $\left(\mathbf{x}{1}, \mathbf{x}{1}^{\prime}\right), \ldots,\left(\mathbf{x}{n}, \mathbf{x}{n}^{\prime}\right)$
- Constraints
- $n \times \text { projective transformation } \mathbf{x}{i}^{\prime}=\mathrm{H} \mathbf{x}{i}$
- Solutions ($n \geq 4$) ⇒
4-point algorithm- OpenCV cv::getPerspectiveTransform() and cv::findHomography()
-
cf. More simplified transformations need less number of minimal correspondence.
→ Affine ($n \geq 3$), similarity ($n \geq 2$), Euclidean ($n \geq 2$)
- [Note] Planar homography can be decomposed as relative camera pose.
- OpenCV cv::decomposeHomographyMat()
- cf. However, the decomposition needs to know camera matrices.
- Unknown
General 2D-2D Geometry (Epiploar Geometry)
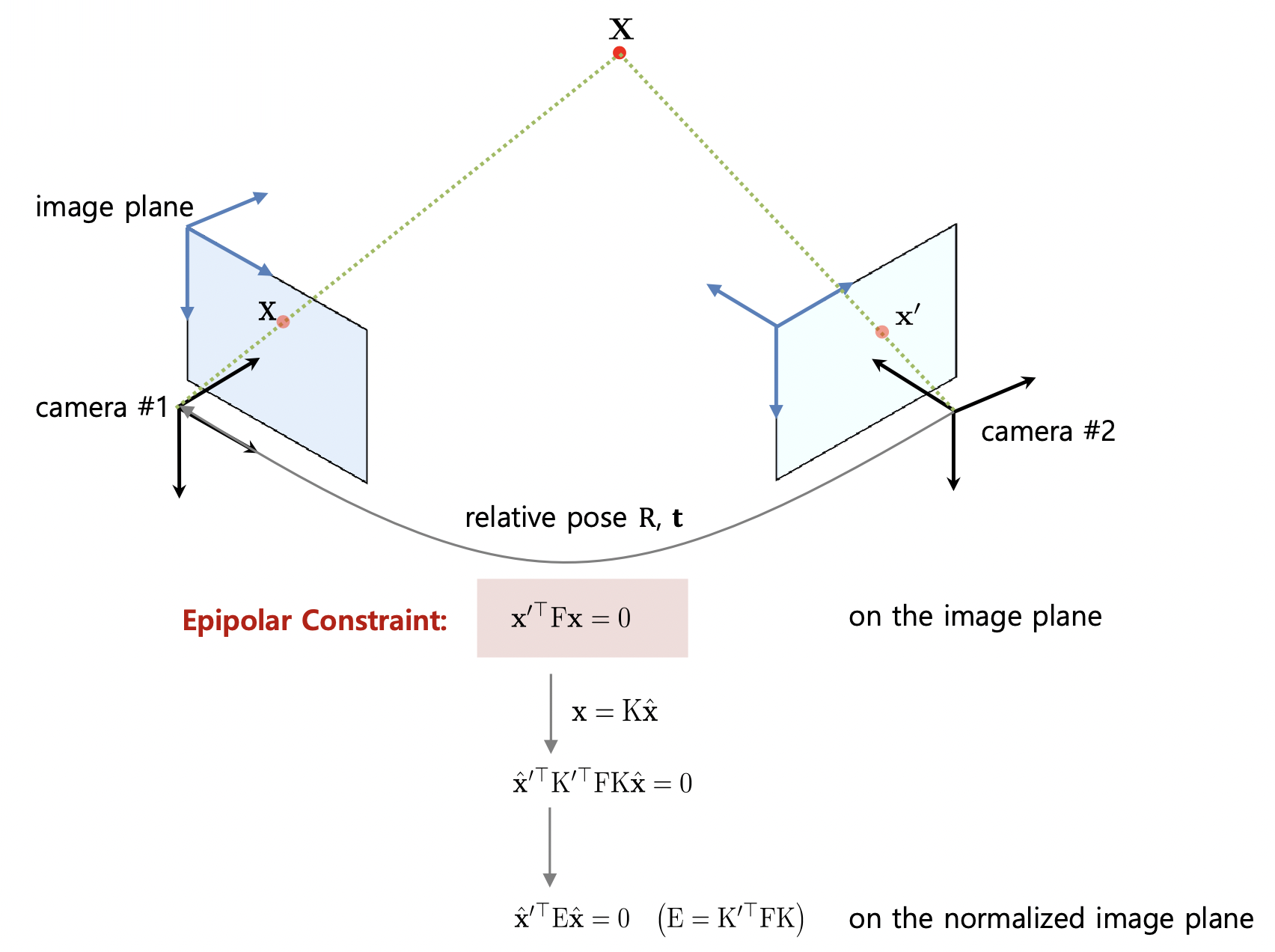
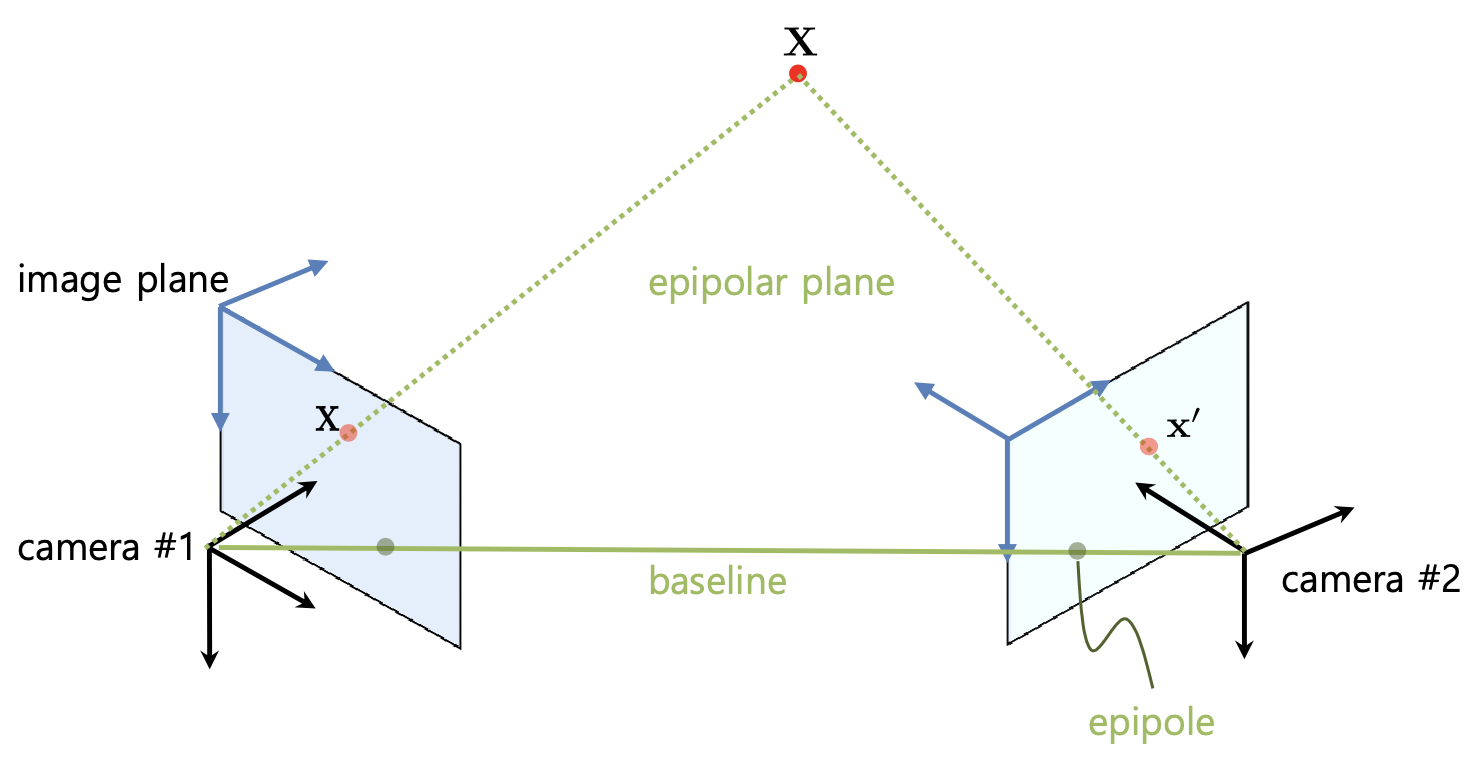
Overview of Epipolar Geometry
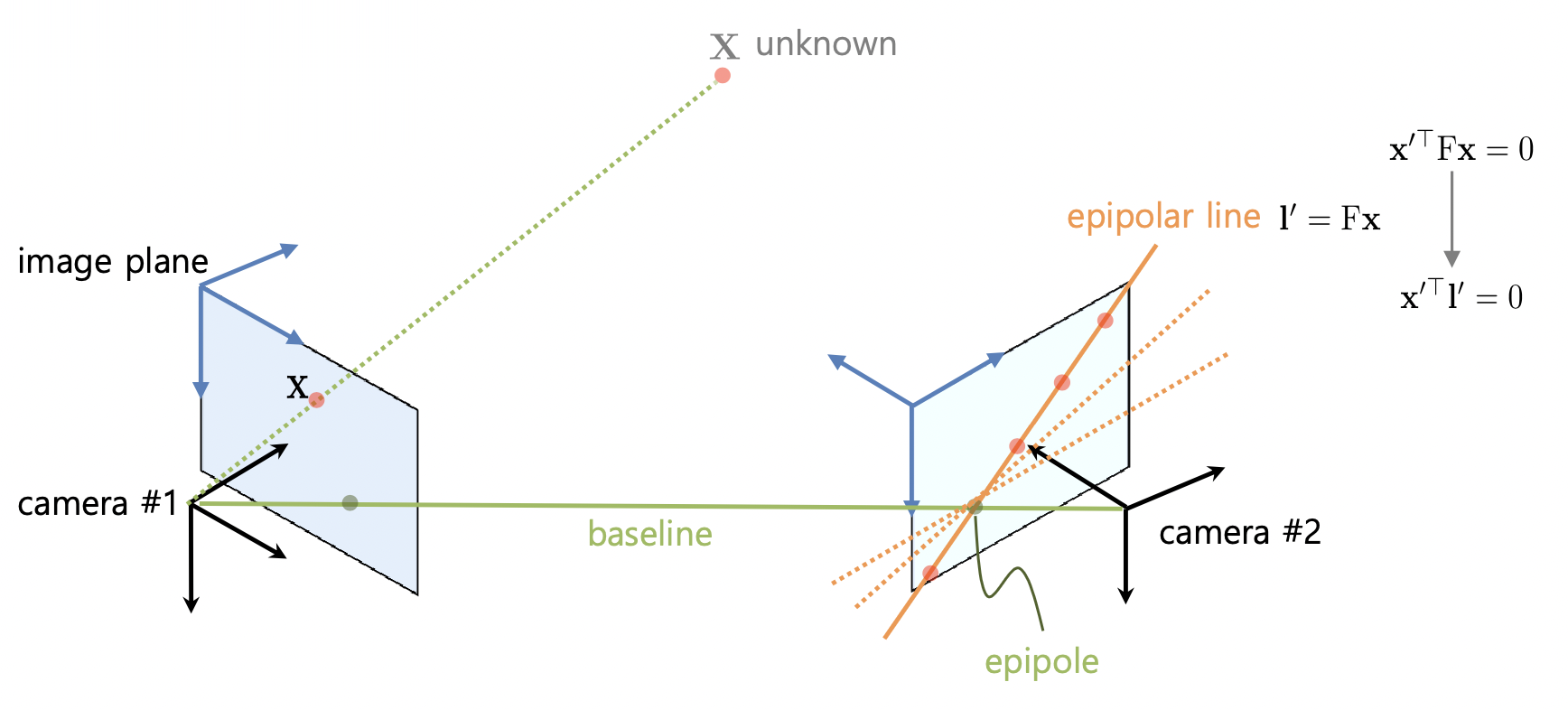
Fundamental Matrix
Essential Matrix
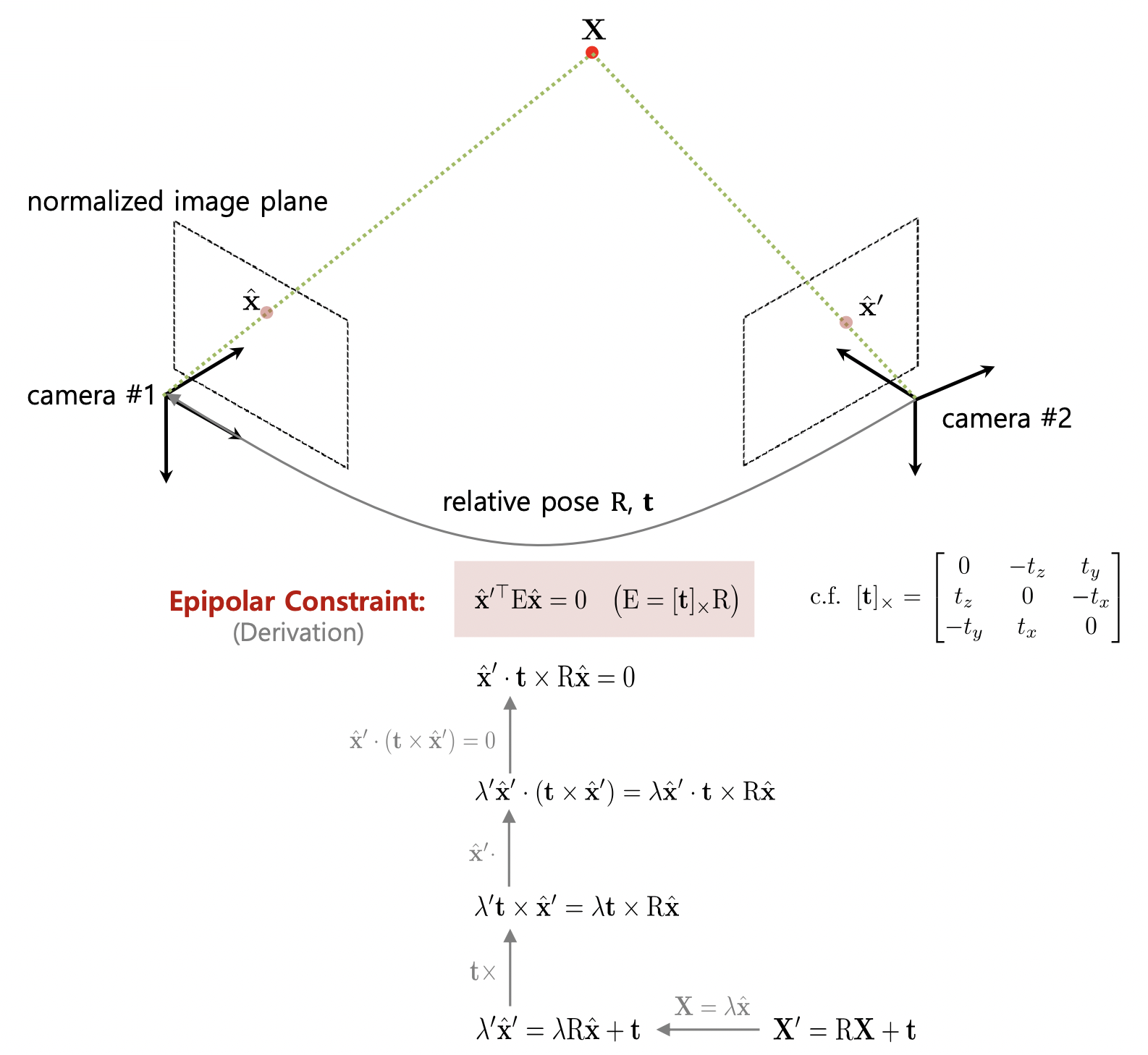
Epiplar Geometry
-
Relative Camera Pose Estimation (~ Fundamental/Essential Matrix Estimation)
- Unknown
- Rotation and translation $\mathrm{R,t}$ (5 DoF; up-to scale “scale ambiguity”)
- Given
- Point correspondence $\left(\mathbf{x}_1, \mathbf{x}_1^{\prime}\right), \ldots,\left(\mathbf{x}_n, \mathbf{x}_n^{\prime}\right)$
- camera matrices $\mathrm{K,K’}$
- Constraints
- $n \times \text { epipolar constraint }\left(\mathbf{x}^{\prime \top} \mathrm{F} \mathbf{x}=0 \text { or } \hat{\mathbf{x}}^{\prime \top} \mathrm{E} \hat{\mathbf{x}}=0\right)$
- Solutions (OpenCV)
-
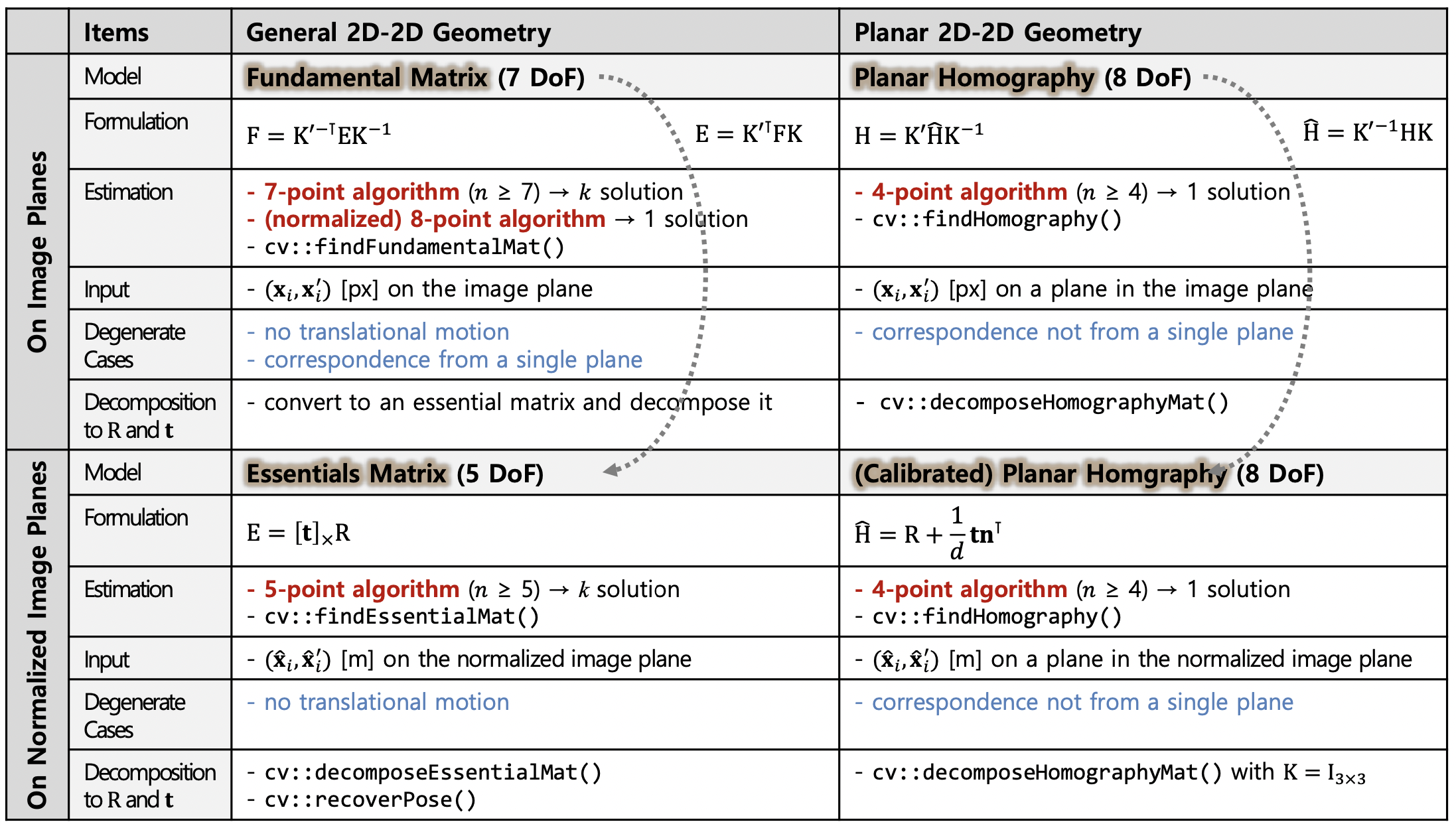
Fundamental matrix: 7/8-point algorithm (7 DoF)
→ Estimation: cv::findFundamentalMat() ⇒ 1 solution
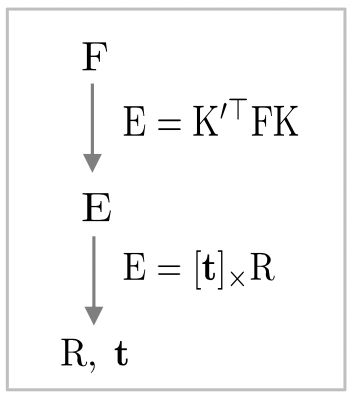
→ Conversion to $\mathrm{E}$: $\mathrm{E}=\mathrm{K}^{\prime \top} \mathrm{FK}$
→ Degenerate cases: No translation, correspondence from a single plane
→ intrinsic & extrinsic camera parameters
-
Essential matrix: 5-point algorithm (5 DoF)
→ Estimation: cv::findEssentialMat() ⇒ $k$ solutions
→ Decomposition: cv::decomposeEssentialMat() ⇒ 4 solutions “relative pose ambiguity”
→ Decomposition with positive-depth check: cv::recoverPose() ⇒ 1 solution
→ Degenerate case: No translation ($\because \mathrm{E}=[\mathrm{t}]_{\times} \mathrm{R}$)
→ extrinsic camera parameters
-
Planar homography: 4-point algorithm (8 DoF)
→ Estimation: cv::findHomography() ⇒ 1 solution
→ Conversion to calibrated $\mathrm{H}$: $\widehat{\mathrm{H}}=\mathrm{K}^{\prime-1} \mathrm{HK}$ → Decomposition: cv::decomposeHomographyMat() ⇒ 4 solutions → Degenerate case: Correspondence not from a single plane
→ intrinsic & extrinsic camera parameters + plane normal
-
- Unknown